RC Diary 2 – months later
I’ve been trying lots of things with RC, but perhaps not flying so much. Some things that I noticed:
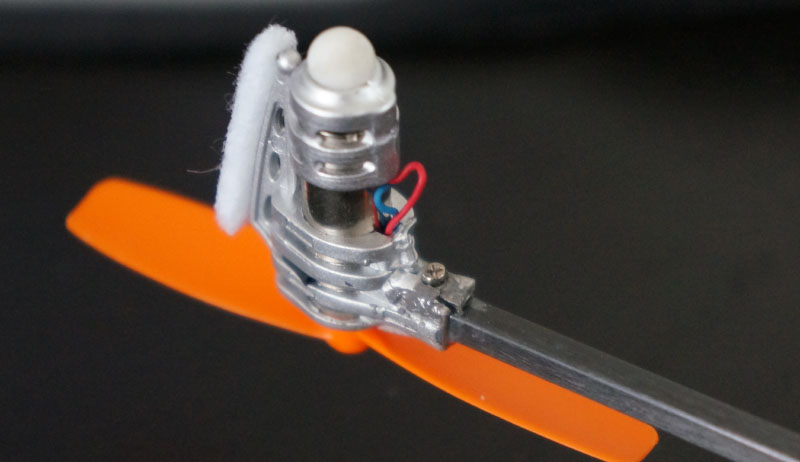
- The Ladybird doesn’t really have very good build quality, the motors were failing and I replaced them with bigger ones (same brand, just from a bigger quad). Those failed even faster 🙁
- FPV flying is really hard, I’ve done it maybe 10 minutes max and have still to get used to it. You go up high so quickly, and with a quad that drifts (in the wind) it’s very easy to lose track of your surroundings. Video reception is also very flaky, even with upgraded antennas.
- There’s a very big difference between different quads; I bought a Hubsan X4 while the Ladybird was broken and it flies very different.
Based on that I have realized some things I wish I knew from the start:
- The Ladybird with FPV was not the right choice to start. Quality is not great and the FPV is just a gimmick until you can fly properly without.
- Instead, something less than half the price turned out more reliable and easier to learn on, the Hubsan X4 H107L. There’s a camera version too, which is probably better than the Ladybird, but probably also not the greatest idea to start with due to double or triple price.
- Flying with a ‘real’ RC-controller like the one that came with the Ladybird, is nicer than the toy-like Playstation-lookalike transmitters that come with the hubsan. Ideally you get a real transmitter and mod it to fly the hubsan. Either something with Walkera Deviation or any PPM (this is a general RC-control output protocol) transmitter (like the Turnigy 9xr) for which you then build a module.
So instead of spending hundreds of euros on stuff of which half is now not working or not that useful, I could probably have spent 150 or so max, for 2 simple quads, and a good transmitter that can be modded to control both. Try not to spend more than 40 euros on your first quad! And make sure you have at least one model for which you can buy spare parts locally (Hubsan X4 in my case); it really sucks having to wait weeks for spares from China when you just want to fly.
So right now I fly my Hubsan a bit indoors, the motors are still doing fine after more flight-time than the Ladybird. The Ladybird meanwhile is grounded and waiting for replacement motors. That will be my last attempt to fix it, so i hope they last a while. After that I’m thinking of going for an affordable brushless motor quad (like an RC-Logger Eye One Extreme); the tiny coreless motors are way too unreliable to keep going seriously..
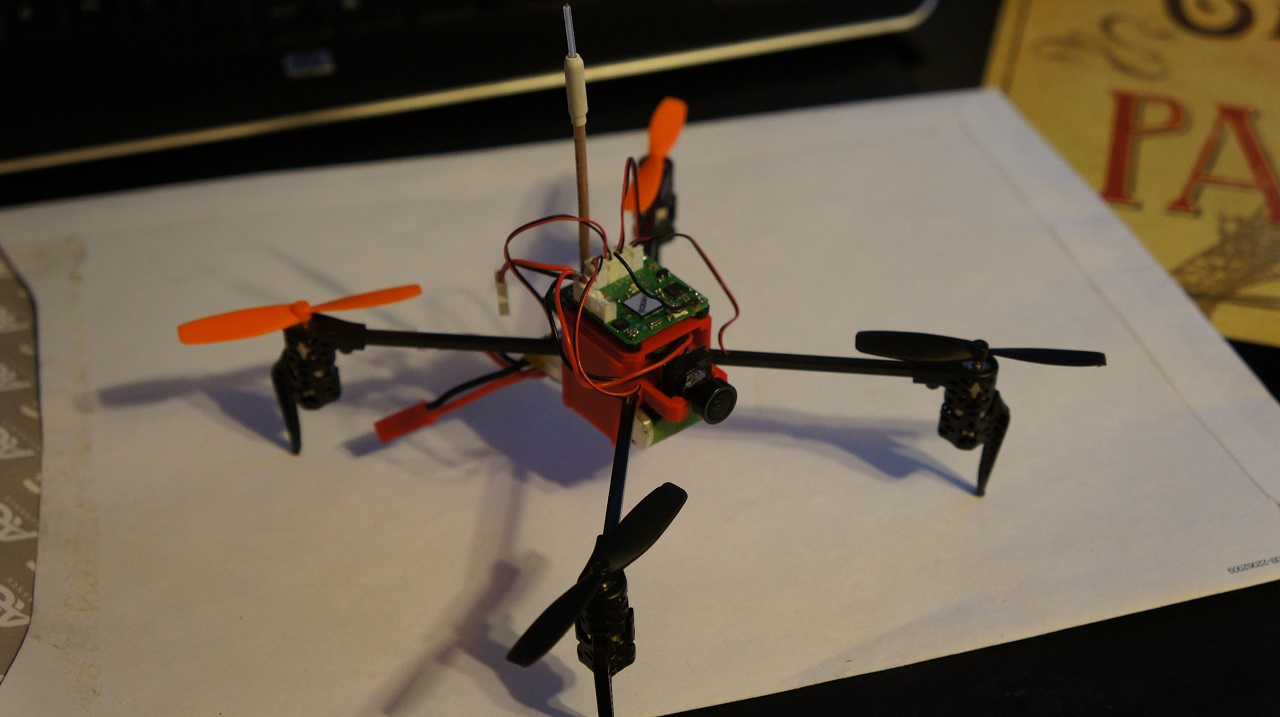
Here’s what my modded ladybird looked like before it broke: